![]()
![]()
6. Dispositivos para Realidade Virtual
Os dispositivos para Realidade Virtual tem como funçăo básica gerar a sensaçăo de imersăo do usuário em um ambiente virtual. Para tanto estes dispositivos atuam de duas formas:
No que tange ŕ leitura, temos duas categorias:
Quanto a impressionar os sentidos, a Realidade Virtual atua em geral sobre a visăo, a audiçăo e o tato.
6.1 Visăo Estereoscópica ou Visăo Espacial
Como a maioria das pessoas tem dois olhos, associamos muito a percepçăo de profundidade ŕ visăo estereoscópica[21, 82]. Na visăo estereoscópica, cada olho registra uma imagem diferente e o cérebro usa o pequeno deslocamento lateral destas imagens para medir a profundidade (figura 6.1).
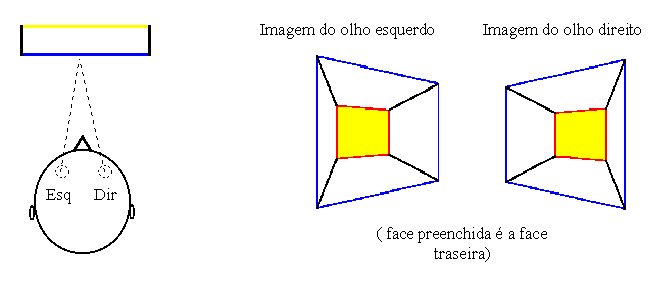
Figura 6.1 - Modelo de Visăo Estereoscópica
A percepçăo de profundidade pode ocorrer, entretanto, com dois olhos ou com apenas um. Quando apenas um olho é usado a profundidade é percebida baseada em características inerentes ŕ imagem como perspectiva linear, sombras, oclusőes (objetos mais distantes săo bloqueados por objetos mais próximos), texturas e detalhes do objeto. Importante também na visăo mono-ocular é a chamada "motion paralax" através da qual, quando se move a cabeça, objetos mais próximos movem-se mais depressa que objetos mais distantes.
Além disto, săo usadas informaçőes sobre a rotaçăo de cada olho ou da chamada "convergęncia" para determinar a real posiçăo de um objeto.
O ângulo de visăo de uma pessoa, chamado "campo de visăo", é de aproximadamente 180ş na horizontal e 150ş na vertical. Como podemos girar os olhos para a esquerda ou para a direita, até um ângulo de 45ş, temos a chamada visăo lateral que amplia o campo que se pode ver para algo em torno de 270ş ao redor da cabeça(figura 6.2)
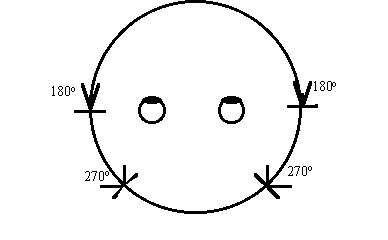
Figura 6.2 - Campo de Visăo Horizontal
6.1.1 Stereo Glasses ou Shutter Glasses
 Útil
em aplicaçőes como visualizaçăo científica ou cirurgias nas quais várias
pessoas precisam observar a mesma imagem estéreo, estes dispositivos buscam
gerar estas imagens a partir de uma tela de computador como as que estamos
acostumados a usar.
Útil
em aplicaçőes como visualizaçăo científica ou cirurgias nas quais várias
pessoas precisam observar a mesma imagem estéreo, estes dispositivos buscam
gerar estas imagens a partir de uma tela de computador como as que estamos
acostumados a usar.
A idéia é colocar no usuário um par de óculos com lentes de cristal líquido capazes de bloquear sua visăo quando necessário. Para o funcionamento do sistema, deve haver um controle da seguinte forma:
Exibe-se na tela a imagem correspondente a do olho esquerdo e bloqueia-se a visăo do olho direito a seguir faz-se o contrário, ou seja, exibe-se a imagem do olho direito e bloqueia-se a visăo do esquerdo.
Nestes sistemas, a dificuldade é a garantia do sincronismo no processo de exibiçăo e bloqueio de forma a năo permitir que o usuário perceba que isto está ocorrendo.
A empresa StereoGraphics produz o "CrystalEyes" ao custo de U$ 985,00. Este Shutter Glasses funciona em PC e em Silicon Graphics.
Uma fonte de informaçăo interessante sobre Shutter Glasses, inclusive com projetos para a montagem deste equipamento, é o livro Step into Virtual Reality - John Iovine - Ed. WindCrest/McGraw-Hill - ISBN:007911906-9.
6.1.1 Head Mounted Displays
A idéia dos HMDs ou VPC (Visores Presos a Cabeça) é exibir em duas pequenas telas (uma para cada olho) imagens de uma cena virtual.
Os HMDs săo construídos, normalmente, usando dois tipos de monitores: os CRTs ou monitores de TV e os monitores de cristal líquido, os LCDs.
Os monitores de TV, em funçăo da avançada tecnologia disponível nesta área, podem exibir imagens de alta resoluçăo com uma qualidade de cor excelente, mesmo em pequenas dimensőes. Entretanto, săo relativamente pesados, volumosos e colocam altas voltagens muito próximas ŕ cabeça do usuário.
Os LCDs, por sua vez, săo leves e podem ser usados com pequenas voltagens. Entretanto, a resoluçăo em monitores pequenos ainda é baixa.
Acoplados aos HMDs, em geral existem sistemas de rastreamento da posiçăo da cabeça a fim de permitir que se atualize as imagens do mundo virtual de acordo com a direçăo para onde o usuário está olhando.
6.1.1 BOOMs - Binocular Omni-Orientation Monitor
 Em
algumas aplicaçőes de Realidade Virtual a qualidade da imagem é essencial.
Nestas, torna-se mandatório o uso de óculos baseados em CRTs. Para evitar,
entăo, problemas com as altas voltagens necessárias e com o peso inerente
a estes dispositivos, foram criados os BOOMs. Tratam-se de pequenos monitores
colocados em uma caixa dentro da qual o usuário pode olhar. Esta caixa
fica suspensa por um braço mecânico, que leva a corrente elétrica necessária
até os monitores. O braço mecânico é, em geral, articulado permitindo que
o usuário, segurando a caixa, possa girá-lo em qualquer direçăo. Se for
colocado nas juntas deste braço mecânico um conjunto de sensores, este
pode servir também como rastreador da posiçăo da cabeça. A empresa FakeSpace[37]
fabrica um BOOM de alta resoluçăo (1280x1024) capaz de exibir imagens de
16 milhoes de cores, por U$ 74,000.
Em
algumas aplicaçőes de Realidade Virtual a qualidade da imagem é essencial.
Nestas, torna-se mandatório o uso de óculos baseados em CRTs. Para evitar,
entăo, problemas com as altas voltagens necessárias e com o peso inerente
a estes dispositivos, foram criados os BOOMs. Tratam-se de pequenos monitores
colocados em uma caixa dentro da qual o usuário pode olhar. Esta caixa
fica suspensa por um braço mecânico, que leva a corrente elétrica necessária
até os monitores. O braço mecânico é, em geral, articulado permitindo que
o usuário, segurando a caixa, possa girá-lo em qualquer direçăo. Se for
colocado nas juntas deste braço mecânico um conjunto de sensores, este
pode servir também como rastreador da posiçăo da cabeça. A empresa FakeSpace[37]
fabrica um BOOM de alta resoluçăo (1280x1024) capaz de exibir imagens de
16 milhoes de cores, por U$ 74,000.
6.1.3 Displays de Retina
O HITL(Human Interface Tecnology Lab) [54] está desenvolvendo um tipo de monitor inovador, batizado de Retinal Display. Trata-se de um laser que exibe as imagens diretamente na retina do usuário.
As vantagens săo que o sistema năo requer equipamentos pesados, pode gerar imagens coloridas de alta resoluçăo e ainda é capaz de captar o movimento dos olhos do usuário[53].
6.2 Dispositivos de Rastreamento
Chamados de "tracking devices" estes dispositivos tem por objetivo principal determinar a posiçăo ou a orientaçăo de uma parte do corpo do usuário. Existem 6 tipos básicos de rastreadores[39, 55]:
6.2.1 Rastreadores Mecânicos
 |
Os rastreadores mecânicos săo usados quando săo necessárias
alta velocidade e precisăo no rastreamento.
Quando se trata de rastrear o movimento da cabeça (ou do corpo como um todo) em geral o usuário veste um capacete ao qual é preso um braço mecânico articulado. A desvantagem desta forma de rastreamento é a pouca mobilidade que ela dá ao usuário. Atualmente, empresas como FakeSpace[37], LEEP Systems e Exo Systems Inc[36], produzem este tipo de rastreador. |
6.2.2 Rastreadores Ultrassônicos
Os rastreadores ultrassônicos determinam uma posiçăo pela emissăo de um som que é captado por um conjunto de receptores. A idéia é que um mesmo controlador comanda a emissăo de um som e "percebe" sua recepçăo nos captadores. O tempo decorrido desde a emissăo até a recepçăo em cada captador, permite o cálculo da posiçăo.
A vantagem deste tipo de rastreador é seu baixo custo e o fato de que no corpo do usuário é preciso apenas colocar pequenos emissores de ultrassom.
 |
A empresa americana Kantech,
por exemplo, criou o RINGMOUSE, um pequeno anel para rastreamento da măo
[86]. A desvantagem, por outro lado, é pouca precisăo destes rastreadores, e a necessidade de que năo haja obstáculos entre o emissor e o receptor de ultrassom. |
6.2.3 Rastreadores Magnéticos
Os rastreadores magnéticos usam conjuntos de bobinas para produzir campos magnéticos e sensores para determinar o tamanho e a direçăo destes campos. O problema deste tipo de rastreador é o tempo que se leva para calcular a posiçăo do usuário e as interferęncias causadas por objetos de ferro e outras fontes de campos magnéticos. Mesmo assim, com o avanço da tecnologia, este tem sido o tipo preferido de rastreador para projetos que exigem precisăo na leitura da posiçăo do usuário.
Atualmente, empresas como a Polhemus[78] e AscensionTechnology Corp[5], estăo comercializando rastreadores deste tipo.
6.2.4 Rastreadores por Extraçăo de Imagens
A idéia destes rastreadores é colocar pequenas luzes (led’s) nas partes do corpo que devem ser rastreadas e, com uma câmera, filmar estas luzes. As imagens filmadas săo entăo processadas e, em funçăo da posiçăo das luzes, calcula-se a posiçăo do usuário.
Pelo reduzido tamanho dos leds, esta é a forma de rastreamento mais confortável de ser usada, entretanto, é a que mais consome tempo de CPU para ser processada.
6.2.5 Rastreadores Óticos
Criados pelos pesquisadores Henry Fucks e Gary Bishop da UNC [104], os rastreadoes óticos săo como uma inversăo dos sistemas de extraçăo de imagens: algumas mini-câmeras sao colocadas sobre a cabeça do usuário, filmam o teto que é composto de uma matriz de leds estáticos.
A idéia é fazer os leds pisarem seguindo algum padrăo enquanto o usuário caminha pela sala. Quando uma câmera capta um dos leds, o sistema registra qual está acesso e assim pode saber a posiçăo do usuário. Para permitir a leitura da rotaçăo do corpo ao redor do eixo vertical, săo colocadas 4 câmeras sobre a cabeça do usuário.
6.2.6 Rastreadores sem Referencial
O grande problema de todos os tipos de sistemas de rastreamento vistos até agora é a pouca mobilidade que eles proporcionam ao usuário que, em geral, tem que ficar "amarrado" ao computador por um conjunto de fios ou restrito a uma área onde os sensores podem captar seu movimento.
Pensando nisto, vem surgindo nos últimos anos, uma linha de pesquisa na área de Sourceless Trackers ou rastreadores sem fontes ou sem referencial [52]. Estes rastreadores dividem-se em algumas categorias, em geral medindo inclinaçőes ou giros, a partir de uma posiçăo inicial. As principais categorias săo: os Inclinômetros, as Chaves de Inclinaçăo e os Sensores Piezoelétricos de pressăo e torçăo.
Os Inclinômetros (ou tilt sensors) săo pęndulos que medem a inclinaçăo de um objeto (ou de parte de um corpo) a partir de uma posiçăo anterior onde o pęndulo estava parado.
As Chaves de Inclinaçăo (ou tilt switches) também medem inclinaçőes como os inclinômetros, mas de uma maneira digital. O funcionamento é o seguinte: imagine uma estrutura plana com pequenos parafusos, ao redor dos quais săo colocados arruelas ou anéis sem que estes se toquem (figura 6.3).
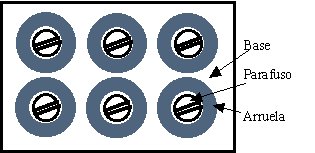
Figura 6.3. - Estrutura Física de um Tilt Switch
Se colocarmos contatos elétricos ligados a cada um dos pares (figura 6.4) e ligarmos em série com eles, mediadores de corrente, poderemos saber quando ocorre o fechamento ou a abertura do circuito.
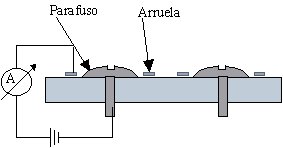
Figura 6.4 - Circuito Elétrico de um Tilt Switch
O fechamento ou a abertura dos contatos se dá colocando-se uma pequena quantidade de mercúrio (Hg) sobre a superfície. Quando a base estiver na horizontal, todas as chaves estarăo em curto, quando houver uma inclinaçăo, algumas delas se abrirăo. Este processo de ‘abrir e fechar’ chaves, permitirá entăo, determinar a inclinaçăo da base, que poderá ser por exemplo, colocado sobre a cabeça de um usuário, ou na base de um joystick.
Os Sensores Piezoelétricos săo materiais capazes de gerar uma corrente elétrica ou mudar sua resistęncia quando sofrem mudança em sua forma. Equipamentos como este podem ser usados, por exemplo, para medir a flexăo dos dedos da măo ou de juntas como cotovelos e joelhos.
As luvas eletrônicas[101], buscam capturar os movimentos das măos (e dos dedos) e usá-los como forma de interaçăo com o usuário. Nesta seçao apresentaremos as principais características de construçăo destas luvas baseados em exemplos de dispositivos comerciais.
6.3.1 Luvas com Mediadores de Luminosidade
Sistema usado pela empresa VPL na construçăo de sua famosa Data Glove, baseia-se no fato de que uma fibra ótica altera suas propriedades de transmissăo de luz quando é flexionada. A idéia foi colocar sobre cada dedo (pelo lado externo da măo) um par de fibras óticas. Uma das fibras serve para medir a flexăo dos dedos na junçăo com a palma da măo e a outra para medir a flexăo no meio dos dedos.
Numa das extremidades de cada uma das fibras é colocado um emissor de luz com intensidade constante, no outro uma foto-célula(figura 6.5). Posteriormente, é feita uma leitura das foto-células para entăo calcular o grau de flexăo dos dedos.
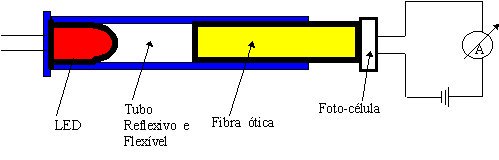
Figura 6.5 - Sistema Mediçăo de Luminosidade com Fibra-Ótica Usado em Luvas
Atualmente a empresa General Reality [39] usa este sistema na luva "5th Glove 95". Seu preço é U$500,00, aproximadamente.
Na Universidade de Illinois (Chicago) os pesquisadores Thomas De Fonti e Donel Sandin criaram o "Sayre Glove" que no lugar das fibras óticas usavam apenas tubos com uma luz em uma extremidade e uma foto-célula em outra.
6.3.2 Luvas com Esqueletos Externos
Introduzida em 1990 pela EXOS Inc [36], a "Dextrous Hand Master" lançou a idéia de usar uma espécie de armadura externa presa ŕ măo para ler seus movimentos. Esta estrutura permite uma leitura rápida e precisa de todos os dedos através de colocaçăo de um sensor em cada junta (figura 6.6). O custo de uma "Dextrous Hand Master", gira ao redor dos U$ 15.000,00 dólares.
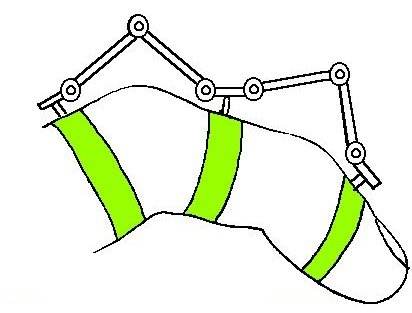
Figura 6.6 - Esquema da Dextrous Hand Master
6.3.4 Luvas com Tinta Condutiva
A mais famosa de todas as luvas de uso doméstico, a "Power Glove" [47](figura 6.7), criada pela empresa Mattel para a Nintendo, é uma luva que usa tinta condutiva para aferir o movimento dos dedos.
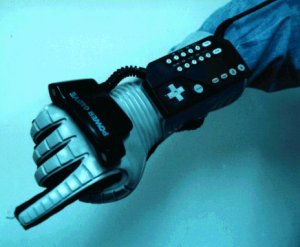
Figura 6.7 - Power Glove
A idéia foi colocar um medidor de resistęncia elétrica nos extremos de uma tira pintada com tinta condutora sobre um substrato flexível.
Quando este substrato é entăo colocado sobre o dorso da măo (dentro de uma luva de lycra) pode-se realizar a leitura dos movimentos dos dedos. Devido ao seu baixo preço(aproximadamente U$ 50,00) muitas pessoas interessaram-se em usá-la no ligado a um PC.
Em 1990 a revista Byte publicou um artigo apresentando as alteraçőes necessárias para ligá-la ŕ porta paralela de um PC [31]. Outra adaptaçăo foi feita em 1993 para ligá-la ŕ porta serial através da "PGSI - Power Glove Serial Interface" [80] o que permitiu seu uso em Mac e Amiga, além de PCs.
Atualmente se pode comprar uma Power Glove, já modificada para o uso em PC, através da INTERNET em endereços como [73], por aproximadamente U$100,00.
Atualmente a luva "CyberGlove" da empresa Virtual Technologies [106], também usa este sistema.
6.4 Dispositivos Geradores de Som 3D
O conceito de audio virtual, [21] definido por Currell no artigo "Virtual audio: new uses for 3-D sounds", é de grande importância em Realidade Virtual para dar ao usuário a real sensaçăo de imersăo.
A adiçăo de sons, em qualquer processo de exibiçăo de imagens que pretende ser de alguma forma interativo, torna a experięncia muito mais realista.
Quando em uma tela, aparece no centro, uma bola picando, a agregaçăo de um som mono ou estéreo, com a simples reproduçăo do som real, sincronizado com o movimento da bola, dá uma sensaçăo de realismo muito grande para quem observa.
Em Realidade Virtual, entretanto, há algo mais a fazer. Quando colocamos um HMD em um usuário os sons do mundo virtual além de terem um timbre, devem ter um dado adicional: sua posiçăo. Ou seja, deve ser possível identificar de onde vem este som, dentro do ambiente virtual.
O primeiro problema que ocorre no caso do som 3D é que a geraçăo do som para cada ouvido deve mudar a cada movimento do corpo ou da cabeça do usuário, bem como da fonte sonora.
Na área de som 3D um dos trabalhos mais importantes já realizados está sendo conduzido pela Ames Research Center da NASA, em colaboraçăo com Scott Foster do Cristal River Engeneering [25] de Groenland, CA. A empresa produz um equipamento chamada Convolvotron que custa aproximadamente U$ 15.000,00 e opera PCs, permitindo até 4 canais de entrada. Há também sistemas mais baratos(entre U$ 500,00 e U$ 1,500) que trabalham com 2 canais.
Nestes sistemas, algumas caixas de som săo colocadas em uma sala e dispostas em forma de círculo. O usuário, colocado no centro do círculo, tem a ilusăo de que o som anda dentro da sala. Entretanto, na versăo atual, ele ainda năo pode mover-se[111].
6.5 Dispositivos Geradores de Sensaçăo de Tato e de Força
Também chamados de haptic interfaces os sistemas que produzem sensaçăo de tato (touch feedback) ou de força (force feedback) săo usados em ambientes de Realidade Virtual para aumentar a sensaçăo de imersăo[50] .
Por exemplo, pegar uma bola de tęnis virtual com a măo e jogá-la para cima pode ser uma experięncia muito mais rica se vocę sentir a textura e o peso bolinha. Manipular o braço de um robô para transportar um objeto, pode ser muito mais rápido se vocę tiver a sensaçăo de que está tocando o objeto e de que ele tem um certo peso.
6.5.1 Diferença entre as Sensaçőes de Tato e de Força
Considere uma măo tocando levemente uma mesa. Neste caso, os sensores que respondem săo os sensores de tato. Se a măo começar a apertar a mesa, mais e mais forte, entăo os músculos da măo e do braço começarăo a se contrair. O nível de força aplicado é entăo sentido pelos ligamentos, nos músculos e nos ossos.
A sensaçăo de tato provę informaçőes sobre a geometria da superfície, sua textura e sua temperatura. Por outro lado, a sensaçăo de força fornece informaçőes sobre o peso do objeto e sua maciez ou dureza.
6.5.2 Dispositivos Geradores de Tato
| Um dos mais antigos geradores de tato săo as bolsas de ar colocadas dentro de luvas. Este sistema, criado pela empresa inglesa Advanced Robotics Research Center, enche e esvazia rapidamente as bolsas de ar para gerar pressăo sobre os dedos do usuário. |  |
A empresa Virtual Technologies [106] produz a luva CyberTouch, que com atuadores que vibram dentro da luva, produzem sensaçăo de tato nas pontas dos dedos e na palma da măo. O custo desta luva é de US$ 14.800,00.
Outro sistema trata-se de uma matriz de pinos(semelhantes a agulhas) que, colocados dentro de solenóides, movem-se contra a pele do usuário, fornecendo a sensasăo de textura.
6.5.3 Dispositivos Geradores de Força
Os joysticks com force feedback provavelmente săo os dispositivos mais comuns nesta área. Criados para atuar em video-games, eles podem, por exemplo, em jogos como o DOOM, gerar a vibraçăo do manete quando se bate em uma parede. Mais sofisticados, os braços geradores de força, săo braços mecânicos semelhantes a robôs, nos quais o usuário pega o manipulador e move-o pelo espaço. O programa de controle do robô, por sua vez, pode, gerar forças contrárias ao movimento da măo do usuário, dependendo da necessidade.
Nestes dois últimos exemplos, os dispositivos apresentados geram a sensaçăo de força sobre toda a estrutura do braço. Para criar esta sensaçăo apenas sobre os dedos, săo usados esqueletos externos (seçăo 6.3.2) e os dedais virtuais. Os esqueletos externos além de registrarem a posiçăo dos dedos podem gerar forças contrárias a seus movimentos.
| Já os dedais virtuais criados no MIT săo usados para prover uma sensaçăo mais realista do gesto de pinçar (com o polegar e com o indicador) um objeto virtual [9,91]. Batizado de PHATHOM(Personal haptic interface mechanism) o sistema, que custa U$ 20.000,00, é composto de um par de dedais presos a braços mecânicos que impedem o movimento livre dos dedos.O equipamento é hoje comercializado pela empresa SensAble Devices Company. | 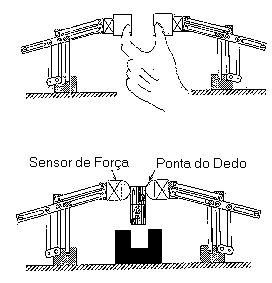 |
Uma fonte de informaçăo interessante sobre este assunto é o livro, Force and Touch Feedback for Virtual Reality - Grigore Burdea - Ed. John Wiley & Sons - ISBN:047102141-5.