3D Scanning System using Structured Light
Visgraf - 2003
Active triangulation
With the 2D coordinates of the boundary points
and the calibration parameters we can start the triangulation process.
Our system uses the saved files of the two previous steps as input for
the coordina tes recovering. For more detailed information about this procedure
check triangulation module documentation here .
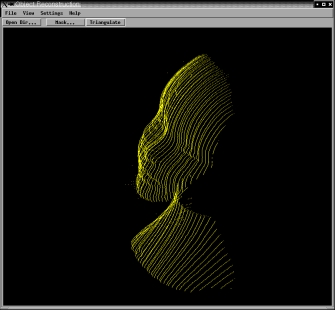
After the coordinates calculation, our system
displays the resulting scan as a set of 3D points using the OpenGL library. The resulting range map can be seen below.
|
Outlier removal
As can be seen below, the
mask image was not able to remove all the unwanted points and therefore we
developed a tool for outlier removal in 3D. After this step, the range map
can be saved for future use (merging and texture application).